
- Запозичення у Природи Конструкції для датчика Тиску
- Розробка пасивного Підводного датчика Тиску
- Перевірка Конструкції датчика Тиску за допомогою Моделювання
Безліч надводних і підводних засобів пересування використовують активні, а тому енерговитратні, методи зондування для виявлення та ідентифікації об'єктів в океані. У спробі знайти енергоефективну альтернативу, група дослідників з PSG College of Technology використовувала чисельне моделювання для дослідження датчика тиску, конструкція якого була «підглянена» у сліпих печерних риб. У даній блог-статті, ми ближче познайомимося з цим інноваційним пасивним МЕМС-датчиком тиску.
Запозичення у Природи Конструкції для датчика Тиску
Водні глибини не дуже пристосована середовище проживання для судів, зроблених людиною. Недолік світла, каламутна або збаламучена вода ускладнюють видимість, а іноді навіть, вона просто відсутня. Глибоководні апарати, такі як підводні човни, повинні виявляти, відстежувати і уникати зіткнення з об'єктами в цих непростих умовах. Але і це ще не все, на підводних човнах є вельми обмежений ресурс енергопостачання і, тому, всі ці засоби контролю повинні бути максимально енергоефективними.
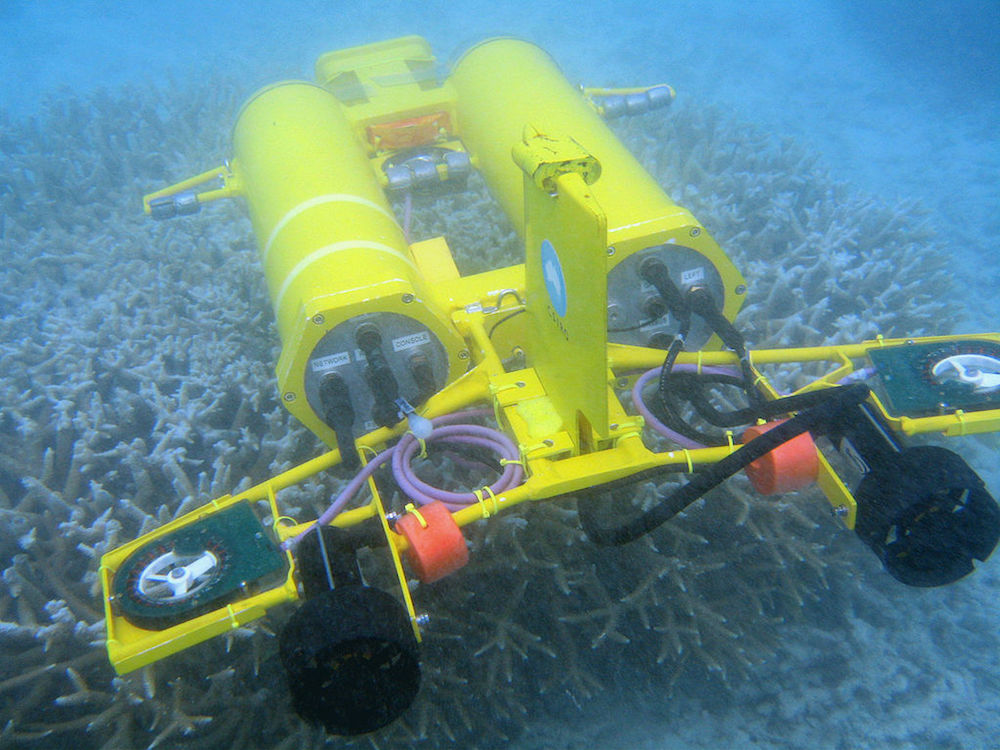
Зображення автономного підводного апарата. (Надано CSIRO ICT Centre. Licensed under Creative Commons Attribution 3.0 Unported , via Wikimedia Commons .)
Більшість стандартних підводних човнів використовують сонарним і оптичні методи для орієнтування в оточуючому просторі. Ці методи працюють, однак вони не позбавлені недоліків. Сонар може завдати шкоди (аж до летального) морським організмам, а оптичні методи практично не приносять користі в умовах поганої видимості. До того ж, обидва ці способи є активними методами детектування (зондування), що загрожує наслідками в умовах обмежених енергоресурсів.
У спробі знайти більш ефективний спосіб орієнтування у водному середовищі для різних засобів пересування, група з PSG Технологічного Коледжу звернулася за пошуком натхнення до досвіду сліпих печерних риб.
Сліпа мексиканська печерна риба здатна швидко пересуватися і уникати перешкод в каламутній і заповненої плаваючими предметами середовищі завдяки масиву невромастов - спеціальних рецепторів, що утворюють органи, так званої, бічної лінії. Зокрема, ця риба може орієнтуватися в навколишньому її просторі, використовуючи поверхневі невромасти, які реагують на зміни потоку оточуючої рідини, а також канали невромастов, що реагують на перепади тиску.
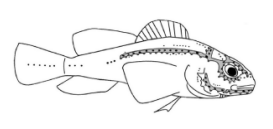
Зображення сліпий печерної риби з затіненими органами бічної лінії. Точки всередині бічної лінії є канали невромастов. Зображення від Aarthi E. et al., З поданій ними статті на Конференції спільноти COMSOL 2013 Бангалорі.
Мабуть, найважливіше властивість цієї печерної риби полягає в тому, що вона виконує зондування навколишнього оточення в пасивному режимі. Це означає, що риба може орієнтуватися у вирі вод, без витрат енергії на випускання хвиль, які можуть завдати шкоди оточенню або, того гірше, розкрити її місцеперебування. Замість цього, ця риба пасивно відчуває потік води, що протікає навколо неї.
За допомогою інтерфейсу Ламінарний Потік (Laminar Flow) середовища COMSOL Multiphysics, дослідники змогли передбачити поведінку своєї конструкції підводного датчика тиску, що використовує такий енергетично вигідний метод пасивного детектування.
Розробка пасивного Підводного датчика Тиску
Щоб створити датчик тиску, який може функціонувати в пасивному режимі, дослідники імітували органи бічної лінії печерних риб.
При проектуванні, індивідуальні датчики тиску були об'єднані в одновимірний масив з десяти штук, подібно органу бічній лінії у печерних риб, з проміжками між ними, щоб уникнути перехресних перешкод. Кожен індивідуальний датчик з масиву має гнучку чутливу діафрагму, закріплену над підставою датчика. Чутливий шар виготовлений з рідкокристалічного полімеру (liquid crystal polymer - LCP), який є гнучким, жорстким і має гарну корозійну стійкість.
На діафрагму поміщаються тензорезисторні датчики, які перетворять зміна тиску в зміна опору золотих пьезорезісторов . Нарешті, дану стоячу структуру, яка імітує поверхневий невромаст печерної риби, можна закріпити на якомусь судні, де вона буде вимірювати значення швидкості.
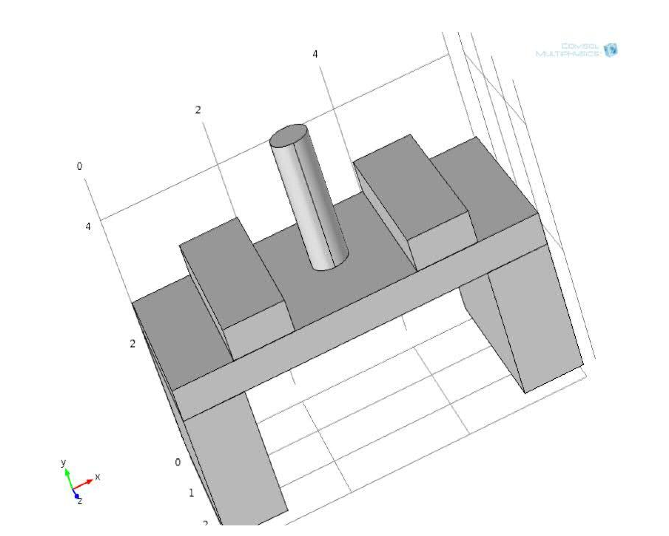
Геометрія МЕМС-датчика тиску. Зображення надано Aarthi E. et al., Зі статті на Конференції спільноти COMSOL 2013 Бангалорі.
Даний датчик тиску може виявляти обурення в воді, що оточує її. Уявімо, наприклад, що підводний човен з цим датчиком наближається до затонулого корабля. Переміщаючись, підводний човен, також як це було б на поверхні, жене перед собою хвилю або потік води. Затонулий корабель викликає зміна в потоці води яка протікала б вільно в його відсутність, а так, вона частково відбивається від перешкоди назад і, тим самим, створює перепад тиску, що діє на мембрану датчика. Датчик здатний відчути це зміна, тому що перепад тиску змушує мембрану зігнутися, як показано на малюнку нижче.
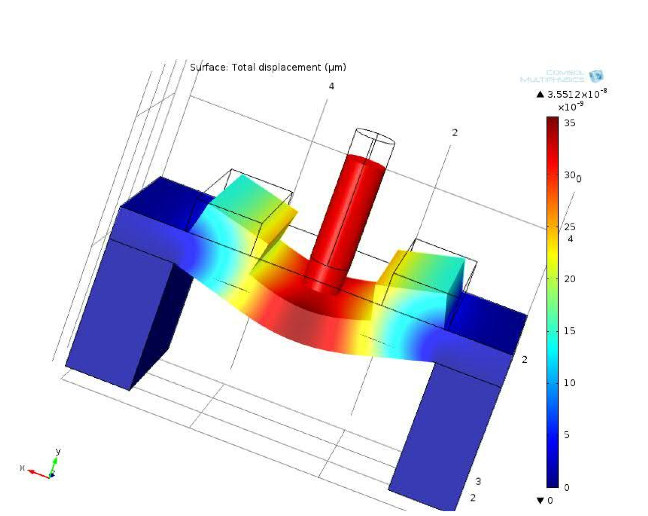
Зсув діафрагми в датчику, викликане прикладеним тиском. Зображення надано Aarthi E. et al., Зі статті на Конференції спільноти COMSOL 2013 Бангалорі.
Вигин мембрани викликає зміну величини опору пьезорезісторов, яке може бути визначено по зсуву напруги. Таким чином, датчик тиску здатний пасивно виявляти зміни в навколишньому середовищі, спричинені, наприклад, затонулих кораблем.
Такий пристрій дозволить підводним човнам вільно орієнтуватися на глибині, не витрачаючи при цьому енергії. Але перш за все, дослідники повинні були переконатися в тому, наскільки добре працює датчик тиску.
Перевірка Конструкції датчика Тиску за допомогою Моделювання
Вчені проаналізували здатність датчика тиску виявляти зміни в навколишньому середовищі шляхом розрахунку розподілу швидкості і тиску для різних рівнів граничних напружень надаються на датчик. В їх моделюванні, зростання граничних напружень супроводжується наближенням об'єкта до датчика. Ця зміна в граничних напружених має також змінювати швидкість і тиск, що випробовується датчиком.
Зліва: Розподіл швидкості по поверхні датчика. Справа: Розподіл тиску по поверхні датчика. Зображення надано Aarthi E. etal., Зі статті на Конференції спільноти COMSOL 2013 Бангалорі.
Результати моделювання показали, що датчик зазнає змін як швидкості, так і тиску при зростанні граничних напружень. Це ті ж зміни, які відчувають сліпі печерні риби, але який граничний рівень чутливості датчика тиску до цих змін?
Дослідники визначили чутливість, як зміна опору тензометрического датчика на одиницю зміни механічної напруги. Вони спостерігали за збільшенням опору, що виникають при зміні тиску, і визначили, що їх датчик є досить чутливим для виявлення перепаду тиску в 5 Н / м2.
В цілому, даний пасивний датчик тиску не тільки досить чутливий, щоб добре виконувати свої функції, але, до того ж, він енергетично вигідний, безпечний і потайний. Така конструкція є хорошою енергозберігаючої альтернативою для застосувань при підводному детектировании тиску. Інтерфейси різних фізичних процесів, таких як взаємодія рідини з різними об'єктами, п'єзорезистивних ефектів і моделі гіперпружних матеріалів, доступні в програмному забезпеченні COMSOL надають можливість безпосереднього моделювання такого роду датчиків.
